참고. 터치스크린(Touch Screen)의 튐 현상 해결방안
들어가기 전에...
- 마음껏 인용하시거나 사용하셔도 됩니다. 단 출처(http://kkamagui.tistory.com)는 밝혀 주십시오.
- 기타 사항은 mint64os at gmail.com 이나 http://kkamagui.tistory.com으로 보내주시면 반영하겠습니다.
- OS 제작에 대한 상세한 내용은 책 "64비트 멀티코어 OS 구조와 원리"를 참고하기 바랍니다.
0.2007/09/27 터치 문제 해결
- Z 값을 이용해서 터치 스크린의 문제를 해결함
- GBA Tek에 있는 소스와 PALib 쪽의 ARM7 함수를 섞어서 해결
- sPressure = (((( touch.px + 1 ) * touch.z2) >> 6) / touch.z1) - (touch.px >> 6);
- 위 식의 문제는 펜으로 강하게 터치했을 때 터치 스크린의 좌측의 값은 0이고 우측의 값은 3이 나온다는 것임
- 터치 스크린의 X 좌표를 이용하게 되어있으므로 좌측의 경우 X 좌표가 0에 가까워져서 분해능이 떨어지는 문제도 발생(좌측의 경우 강약에 따라서 0
1, 우측의 경우 330 정도의 범위) - sPressure1 = ( touch.z2/( touch.z1 - 1 ) );
- 위 식의 문제는 강하게 터치했을때 터치 스크린의 좌측 일정 범위를 넘어서면 값이 튀는 것임(X좌표의 범위가 0~20 정도일때 값이 급격하게 변함)
- 그외의 범위에서는 세게 눌렀을 때 값이 우측에서 좌측으로 갈때 3->2->1->0 정도로 변함
- 결국 두 값의 MIN을 취해서 해결
- 어느정도 세기의 문제와 X 축 좌표에 따른 압력값 편차의 문제를 해결함
- 압력값은 5정도 보다 작도록 설정하면 안튀는 것 같음
- 아래는 사용한 코드
// 압력계산 코드
sPressure = (((( touch.px + 1 ) \* touch.z2) >> 6) / touch.z1) - (touch.px >> 6);
sPressure1 = ( touch.z2/( touch.z1 - 1 ) );
if( sPressure1 < sPressure )
{
sPressure2 = sPressure1;
}
else
{
sPressure2 = sPressure;
}
// 아래의 Touch와 XY버튼은 특별한 케이스이다.
// Touch Down
// Down 메시지는 계속 보낸다.
if( ( usSpecial & ( 0x01 << 6 ) ) && ( touch.x != 0 ) && ( touch.y != 0 ) && **( sPressure2 < 5 )** )0.2007/09/22 터치 문제 발견
- 아직 확실하게 터치 스크린 튀는 문제가 해결이 안됬음
- 아무래도 확실하게 해결하기는 어려운 문제인듯 함... 약간의 기교로 처리할 수는 있는데... 그것 또한 완전하지 않음
- 결국 원래의 Touch 함수를 사용하고 Z축 값을 입력 받아서 사용하도록 만듬
- PALib 쪽의 ARM7 의 Main 함수를 참고
- 아래는 수정된 VcountHandler() 함수
/**
VCount Handler 함수
템플릿의 기본 소스를 아주 간단한 로직으로 수정
*/
void VcountHandler()
{
touchPosition tempPos;
unsigned short usButton;
unsigned long ulTemp;
int a, b;
ulTemp = \_touchReadTemperature( &a, &b );
usButton = REG\_KEYXY;
// 만약 Touch가 되었으면 좌표를 읽어서 설정한다.
if( ( usButton & ( 1 << 6 ) ) == 0x00 )
{
tempPos = touchReadXY();
if( tempPos.x == 0 || tempPos.y == 0 )
{
IPC->mailBusy = 1;
IPC->buttons = usButton | (1 << 6);
IPC->temperature = ulTemp;
IPC->mailBusy = 0;
}
else
{
IPC->mailBusy = 1;
IPC->touchX = tempPos.x;
IPC->touchY = tempPos.y;
IPC->touchXpx = tempPos.px;
IPC->touchYpx = tempPos.py;
IPC->touchZ1 = tempPos.z1;
IPC->touchZ2 = tempPos.z2;
IPC->temperature = ulTemp;
IPC->buttons = usButton;
IPC->mailBusy = 0;
}
}
else
{
IPC->mailBusy = 1;
IPC->buttons = usButton;
IPC->temperature = ulTemp;
IPC->mailBusy = 0;
}
g\_iVCount ^= (80 ^ 130);
SetYtrigger(g\_iVCount);
} - 아래는 사용하는 소스다
// Button의 상태를 읽는다.
// Mail이 Busy이면 대기한다.
while( IPC->mailBusy );
usSpecial = ~( IPC->buttons );
touch.x = IPC->touchX;
touch.y = IPC->touchY;
touch.px = IPC->touchXpx;
touch.py = IPC->touchYpx;
touch.z1 = IPC->touchZ1;
touch.z2 = IPC->touchZ2;
sPressure = (((IPC->touchXpx \* IPC->touchZ2) >> 6) / IPC->touchZ1) - (IPC->touchXpx >> 6);
// Z축 테스트 용
DrawBox( ( void\* ) 0x06000000, 16, 16, 256, 32, BIT( 15 ), TRUE );
sprintf( vcBuffer, "%d %d %d", touch.z1, touch.z2, sPressure );
HanPutStr(( void\* ) 0x06000000, 16, 16, RGB15( 0x1F, 0x1F, 0x1F ) | BIT( 15 ), vcBuffer );
...
if( ( usSpecial & ( 0x01 << 6 ) ) &&
( touch.x != 0 ) && ( touch.y != 0 ) && **( sPressure < 9 )** )0.시작하면서... 2007/09/22 이전...
문쉘의 터치 스크린 관련 소스를 분석해보면 아주 간단하게 되어있음을 알 수 있다. 문서를 읽어보면 터치 스크린에서 값을 읽는 데는 어느정도 시간이 걸리고 또한 정확한 값을 읽기 위해서는 여러번 반복해서 읽어줘야 한다는 것을 알 수 있다. 문쉘의 터치스크린 소스 분석 부분은 07 문쉘(Moon shell)의 터치스크린(Touch Screen) 소스를 참고하고 터치스크린 제어에 대한 부분은 06 키패드(KeyPad) 및 터치스크린(Touch Screen) 제어 부분을 참고하도록 하자.
왜 터치스크린의 값이 이토록 튀는 것일까? 아래와 같은 문제점때문이 아닐까 추측하고 이것을 해결하려 노력했다.
- X의 좌표값을 읽고 Y의 좌표값을 읽었을 때 SPI를 통해서 값을 읽고 이것을 몇변 반복하는 동안 시간이 걸린다.
- 터치스크린으로 부터 값을 읽는 동안 언제든지 사용자의 동작에 따라 펜이 Release 될 수 있다.
- ARM7에서 값을 쓰고 ARM9에서 값을 읽을 때 동기화의 문제
이제 위의 문제에 대해서 하나하나 살펴보도록 하자.
1.X/Y 좌표 값을 읽는 타이밍(Timing) 문제
터치스크린쪽 스펙을 보면 터치스크린의 값이 유효하지 않을 수 있으니, 여러번 읽어서 사용하라고 되어있다. 실제 코드도 그것을 증명하듯 libnds도 그렇고 문쉘의 소스도 여러번 읽게 되어있다. 실제로 유효하지 않은 값인지를 판단하는 부분은 양쪽이 다 다르지만...
여러번 읽어서 유효한 값을 찾는 것도 중요하지만, 여기에는 큰 문제가 있다. 일단 SPI를 통해서 읽기 때문에 메모리에서 바로 읽는 것 보다는 더 큰 시간이 걸리고(스펙을 보라... 클럭이 1~3MHz 정도다.. ㅡ_ㅡ;;;) X의 좌표를 여러번 읽게 되므로 Y의 좌표를 읽을 때 쯤에는 상당한 시간이 지나있다. 반복하는 회수에 따라서 차이가 있긴 하겠지만 많이 읽으면 읽을 수록 갭은 커친다.
문쉘의 경우에는 5번을 반복하되 읽은 값이 처음 읽은 값과 비교하여 오차범위가 30 내외이면 유효한 값이라 판단하고 그 값을 사용하게 된다. 5번 반복하는 것도 좋지만 어차피 유효한 값을 체크하는 것이라면 3번 정도도 충분하고 오차범위도 30은 큰편이라 생각되어 10으로 줄였다.
물론 오차범위를 줄이면 유효한 값이라 판단되는 범위가 줄어들어서 펜이 Release가 되었다고 인식될 확률이 높지만, 펜이 자주 릴리즈되는 문제는 타이머를 사용하면 해결 할 수 있기 때문에 될 수 있으면 최대한 유효한 정보를 얻는데 초첨을 두었다.
2.펜 릴리즈(Pen Release) 문제
값을 반복해서 읽다 보면 도중에 펜이 릴리즈되어 값이 유효하지 않는 경우가 생긴다. 이때 값은 문서에 보면 X 축의 유효하지 않은 값은 0으로 송신한다. 하지만 Y의 경우는 0이 아니라 0xFFF로 온다. Y 값 같은 경우 0xFFF가 수신되면 0으로 변경하여 값을 넣게 하고 응용 프로그램에서 터치스크린의 Touch.X, Touch.Y의 값이 둘다 0이 아닐때만 사용하도록 하여 정확도를 높였다.
3. ARM9과 ARM7의 동기화(Syncronization) 문제
사실 이 부분은 가상 IPC 구조체에 Busy 플래그를 1로 설정하는 것으로 처리하고 굳이 신경쓰지 않았다. 그 이유는 ARM7에서 터치스크린에 값을 읽는 시간은 디스플레이의 V Count를 이용하여 80번째 스캔라인에서 읽도록 했기 때문이다. ARM9의 경우 가상 IPC에서 값을 읽는 시간은 VBlank 때이므로 시간적 차이가 좀 있다. 따라서 크게 신경쓰지 않았다. 추후 더 자주 읽어야하거나 어떤 문제가 발생하면 좀 더 동기화에 세밀한 신경을 써야 할지도 모르겠다.
4.구현
아래는 실제 코드인 _touch.c 파일의 내부이다. 첨부 파일로도 추가해 놓았다.
#include "_touch.h"
#include <nds.h>
#include <nds/jtypes.h>
#include <nds/system.h>
#include <nds/arm7/touch.h>
#include <nds/registers_alt.h>
#include <stdlib.h>
// 글로벌 변수들
static bool gs_bTouchInit = false;
static long gs_lXScale, gs_lYScale;
static long gs_lXOffset, gs_lYOffset;
/**
문쉘에서 사용하는 touchRead 함수
libnds 함수랑 크게 차이 없음
*/
__attribute__((noinline)) static uint16 _touchRead(uint32 command) {
uint16 result;
SerialWaitBusy();
// Write the command and wait for it to complete
REG_SPICNT = SPI_ENABLE | SPI_BAUD_2MHz | SPI_DEVICE_TOUCH | SPI_CONTINUOUS; //0x0A01;
REG_SPIDATA = command;
SerialWaitBusy();
// Write the second command and clock in part of the data
REG_SPIDATA = 0;
SerialWaitBusy();
result = REG_SPIDATA;
// Clock in the rest of the data (last transfer)
REG_SPICNT = SPI_ENABLE | 0x201;
REG_SPIDATA = 0;
SerialWaitBusy();
// Return the result
return ((result & 0x7F) << 5) | (REG_SPIDATA >> 3);
}
/**
온도를 읽는 함수
libnds와 크게 차이 없음
*/
uint32 _touchReadTemperature(int * t1, int * t2) {
*t1 = _touchRead(TSC_MEASURE_TEMP1);
*t2 = _touchRead(TSC_MEASURE_TEMP2);
return 8490 * (*t2 - *t1) - 273*4096;
}
/**
TOUCH의 값을 읽어서 유효성을 체크하여 값을 리턴하는 함수
*/
__attribute__((noinline)) static s32 readTouchValue(int measure, int retry, int range)
{
int i;
s32 this_value=0, this_range;
s32 last_value = _touchRead(measure | 1);
for ( i=0; i < retry; i++)
{
this_value = _touchRead(measure | 1);
this_range = abs(last_value - this_value);
if (this_range <= range) break;
}
if ( i >= retry ) this_value = 0;
return this_value;
}
/**
터치 스크린 사용에 관련된 변수값을 설정하고 초기화 하는 함수
*/
void _touchReadXY_AutoDetect(void)
{
gs_lXScale = ((PersonalData->calX2px - PersonalData->calX1px) << 19) / ((PersonalData->calX2) - (PersonalData->calX1));
gs_lYScale = ((PersonalData->calY2px - PersonalData->calY1px) << 19) / ((PersonalData->calY2) - (PersonalData->calY1));
gs_lXOffset = ((PersonalData->calX1 + PersonalData->calX2) * gs_lXScale - ((PersonalData->calX1px + PersonalData->calX2px) << 19) ) / 2;
gs_lYOffset = ((PersonalData->calY1 + PersonalData->calY2) * gs_lYScale - ((PersonalData->calY1px + PersonalData->calY2px) << 19) ) / 2;
gs_bTouchInit = true;
}
/**
외부에서 사용하는 함수
실제 Pixel 좌표와 Raw 좌표를 리턴
*/
touchPosition _touchReadXY()
{
touchPosition touchPos;
if(gs_bTouchInit==false)
{
REG_IME=0;
while(1);
}
// 매크로를 사용하지 않고 그냥 hex 값으로 사용함
touchPos.x = readTouchValue(0xD4 | 1, 2, 10);
touchPos.y = readTouchValue(0x94 | 1, 2, 10);
touchPos.z1 = readTouchValue(0xB4 | 1, 2, 30);
touchPos.z2 = readTouchValue(0xC4 | 1, 2, 30);
// x의 값은 0이면 Release이지만 y는 0xfff이면 Release다. 따라서 처리 로직 추가
if( touchPos.y == 0xFFF )
{
touchPos.y = 0;
}
s16 px = ( touchPos.x * gs_lXScale - gs_lXOffset + gs_lXScale/2 ) >>19;
s16 py = ( touchPos.y * gs_lYScale - gs_lYOffset + gs_lYScale/2 ) >>19;
if ( px < 0) px = 0;
if ( py < 0) py = 0;
if ( px > (SCREEN_WIDTH -1)) px = SCREEN_WIDTH -1;
if ( py > (SCREEN_HEIGHT -1)) py = SCREEN_HEIGHT -1;
touchPos.px = px;
touchPos.py = py;
return touchPos;
}5.마치며...
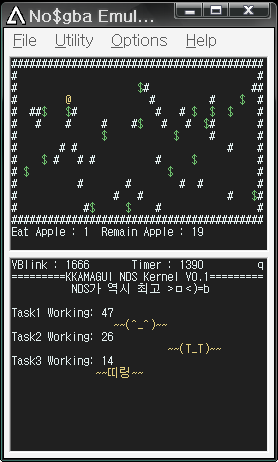
실제 위의 코드를 적용하여 새로운 버전의 KKAMAGUI Notepad를 구현하였는데, 튀는 문제가 없어졌다. 앞으로 저 소스를 libfat 대신 이용해야 겠다.
6.첨부
'NDS 홈브루(Homebrew) > 홈브루 Tutorial' 카테고리의 다른 글
| 참고. 롬 파일에 데이터(사운드, 이미지 등등) 파일 포함 방법 (0) | 2007.11.14 |
|---|---|
| 참고. 디버그 영역을 이용한 가상 IPC 통신 (0) | 2007.11.14 |
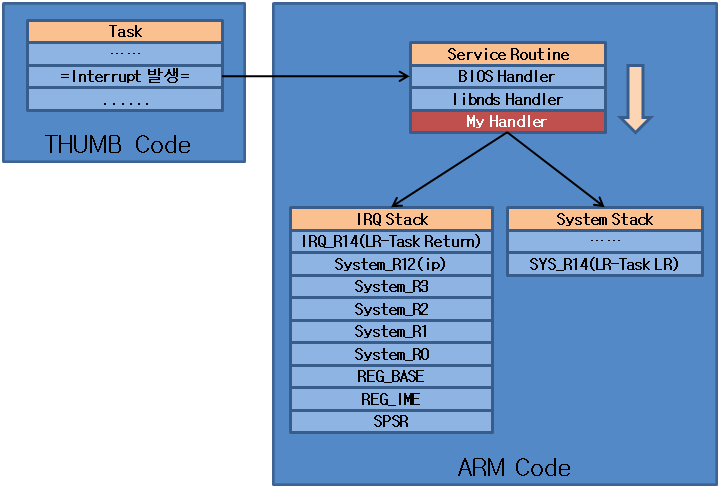
| 참고. THUMB 코드와 ARM 코드 및 상호 호출(Interworking) (0) | 2007.11.14 |
| 참고. Software Reset 방법 (0) | 2007.11.14 |
| 참고. NDS 속도에 대한 몇가지 테스트 (0) | 2007.11.14 |